|
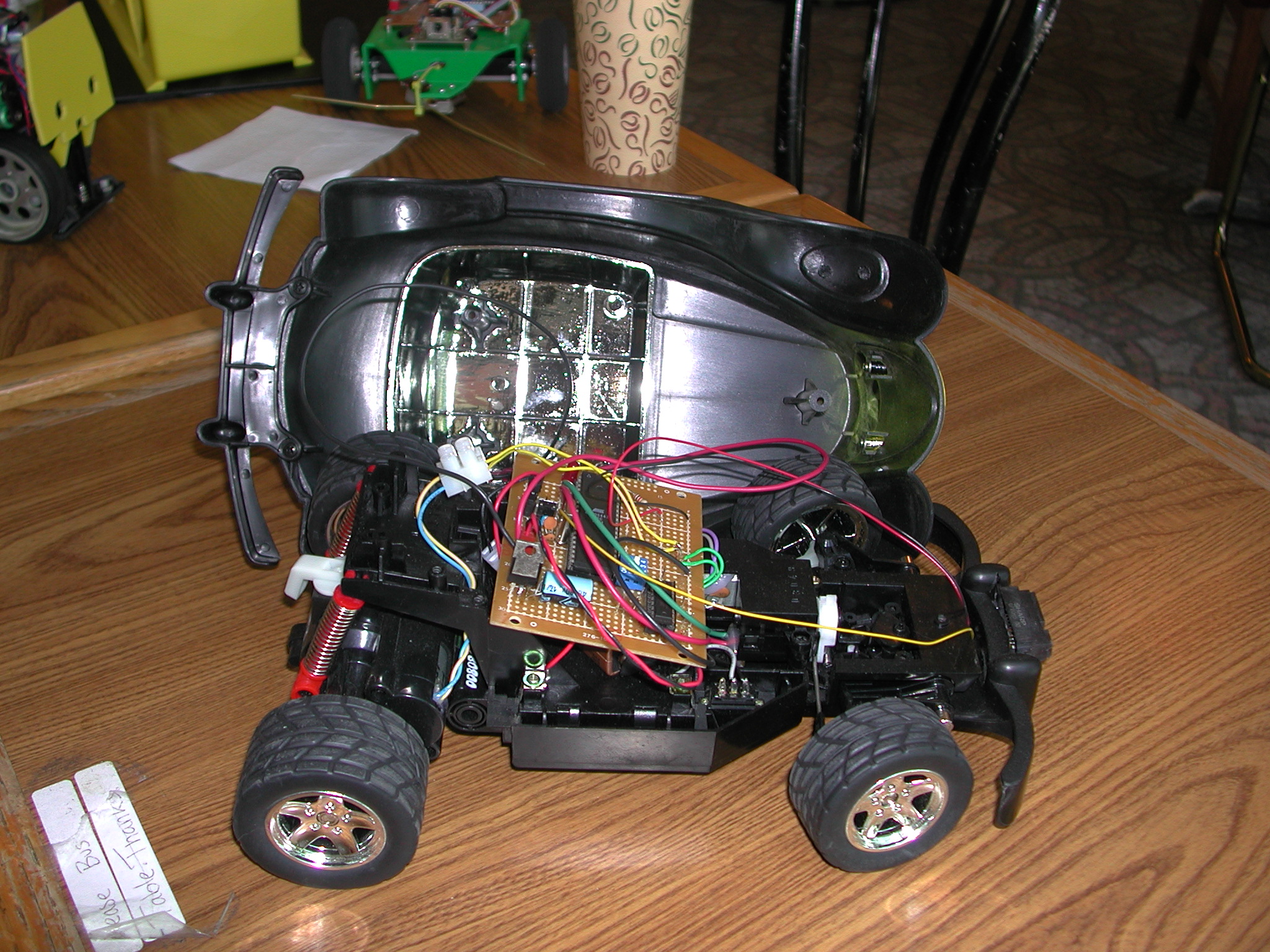
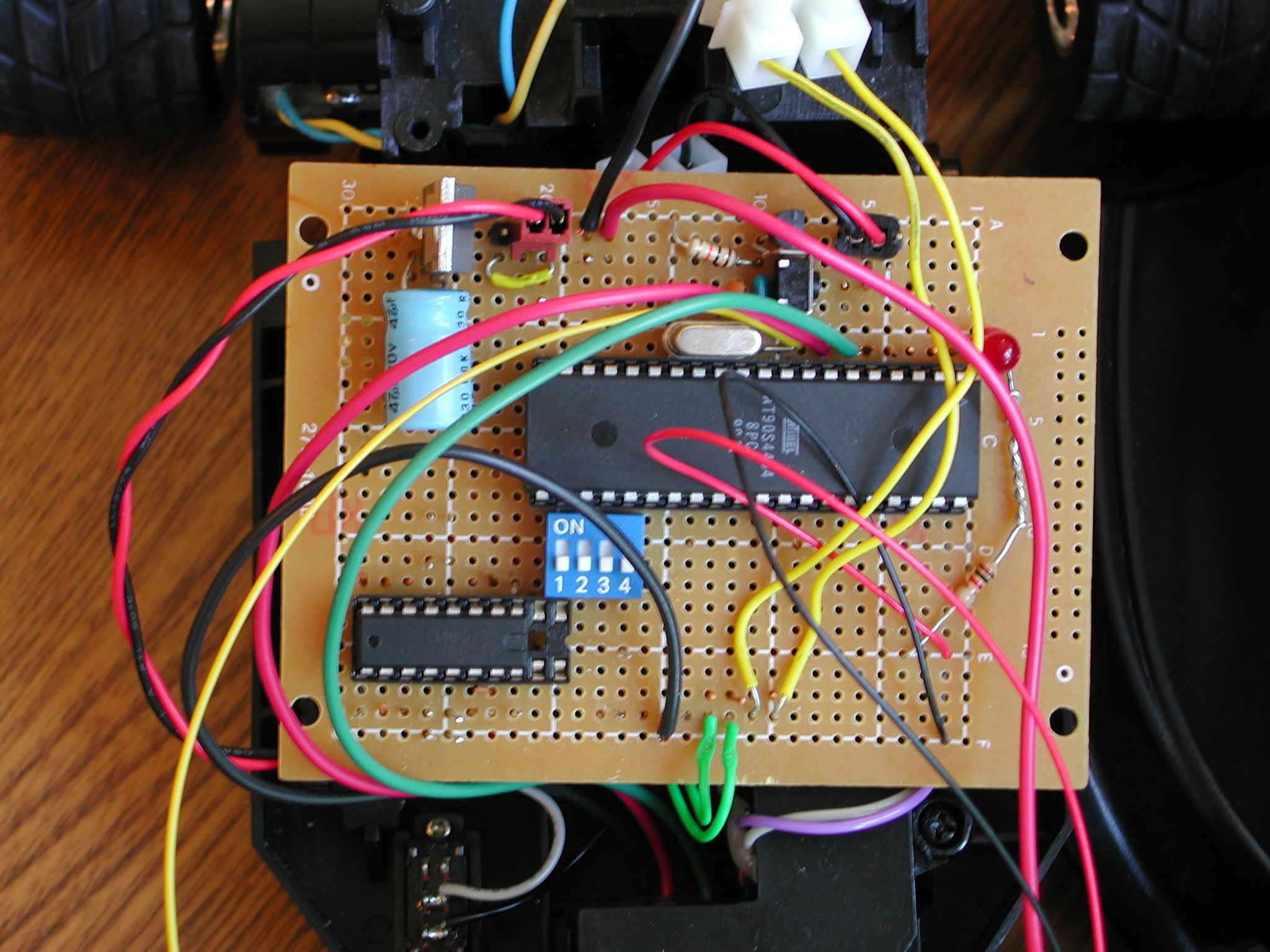
- I recently converted a
RadioShack remote control car into an autonomous
robot. I used the Texas
Instruments SN754410NE Quad Half H-Bridge to control the
motors (drive and stearing). I used the GP2D12
range finder to detect obstacles. The controller
is a point-to-point wired Atmel AVR board that I designed.
- I just got some more sensors from Acroname.
I have the Sharp GP2D12
and GPD15
Distance Detectors. I also got a Hamamatsu
Photoreflector. I haven't done anything with these yet, but
I'm sure I will soon :)
- I got a copule of Texas
Instruments SN754410NE Quad Half H-Bridge chips as samples
from the TI web site. I managed to hook one of these up to
my Tamiya
Twin-Motor Gearbox this weekend so that will probably be the
base to the BOTBoard
2..
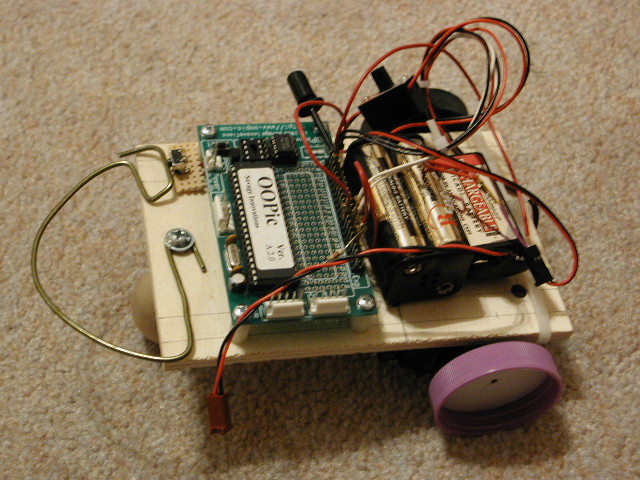
- Here is a picture of
my first (non-lego) robot ever!!! It drives forward, if it bumps into
something in front of it, it backs up turns around (slightly
more than 180 degrees) and then goes forward again. Very simple
really -- it emulates one of the built in behaviors of my Lego
Robotics Discovery Set.
- I also purchased an OOPic
from Acroname. My order
was here in 1 day!!! It helps that Acroname is based in Boulder,
CO, which is where I live... I purchased a couple of Futaba
S3003 servos from the local Hobby
Town USA. The folks over there were nice, but pretty
clueless when it comes to building robots, or even hacking
existing stuff. One of the servos was DOA so I need to go
exchange it, I have performed the continuous rotation servo hack
that is described all over the place, here
for example.
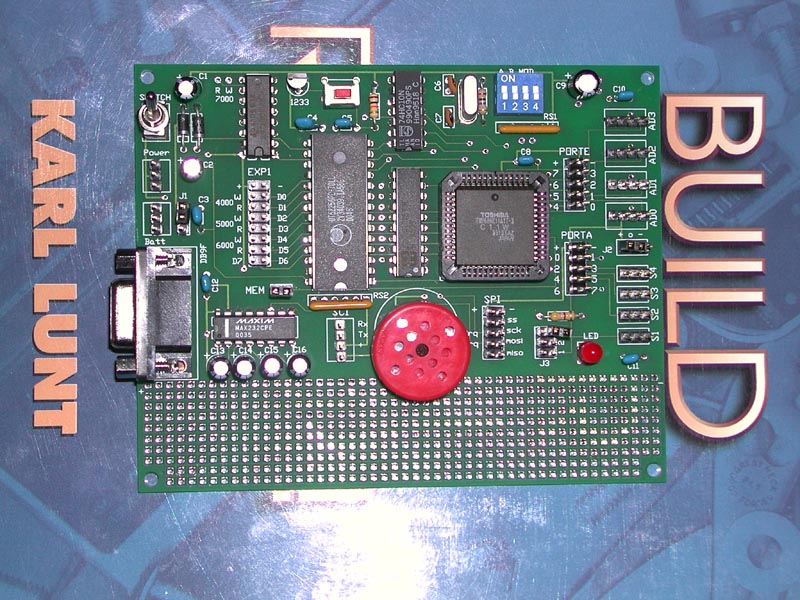
- The BotBoard 2
is complete. See picture.
I still need to check the Piezo Speaker which I'm pretty sure
won't work, but everything else appears to be good.
- I have ordered a BOTBoard
2 from the Parts
Man over at the Portland
Area Robotics Society. I have also ordered most of the parts
listed in the manual.
Unfortunately quite a lot of the parts are not available from
the suppliers indicated with the part numbers that are shown.
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}